


新聞中心
NEWS CENTER
智慧礦山系統工程及關鍵技術研究與實踐
所屬分類: 行業動態
2024-10-17
1.智慧礦山系統工程概述
總體技術架構:將智慧礦山細分為信息感知支撐層、邊緣計算層、云數據中心、多型網絡、礦山智能生產管控平臺、礦山智能生產系統、智慧礦山運維管理系統。
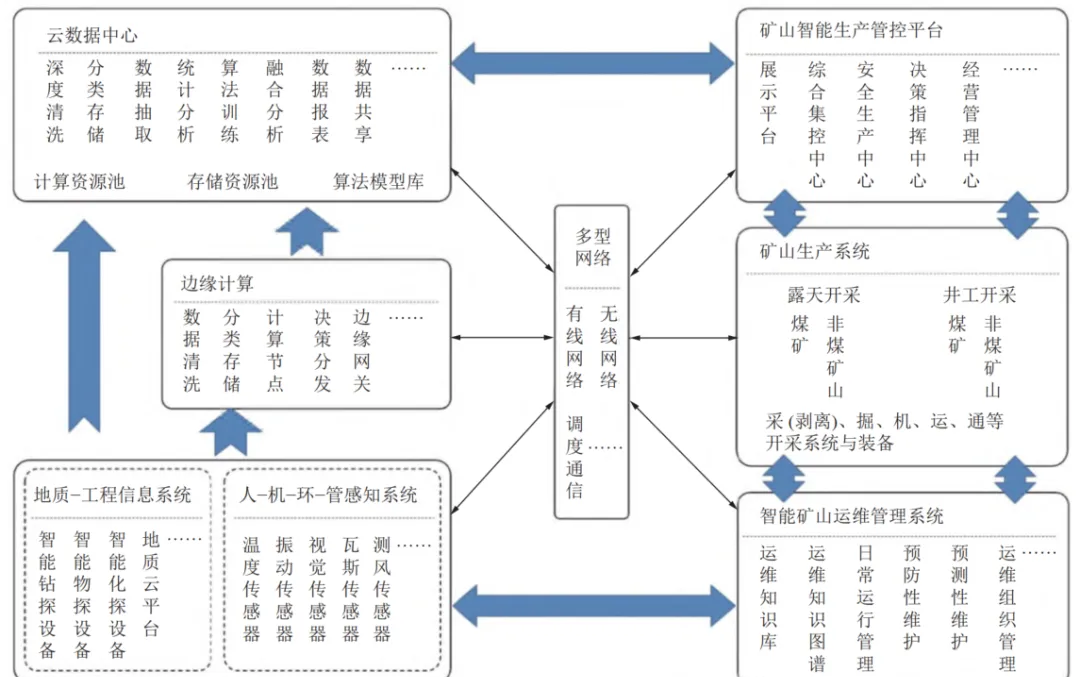
存在問題:技術裝備智能化水平不高、系統融合能力不足、對復雜條件適應性較差、主要系統智能化技術裝備存在瓶頸、數據治理能力不足、5G 應用場景有待挖掘、系統裝備可靠性與適應性較差。
2. 智慧礦山系統模型與數據基礎
智慧礦山系統工程模型:
信息實體:提取并描述物理實體,具有實體屬性和關聯屬性。實體屬性對信息實體進行基本描述,包括屬性信息、結構信息、功能信息等;關聯屬性描述信息實體之間的關系屬性,包括分組/分類等關聯屬性、層次關系屬性、重要度關系、影響關系屬性及行為屬性等。
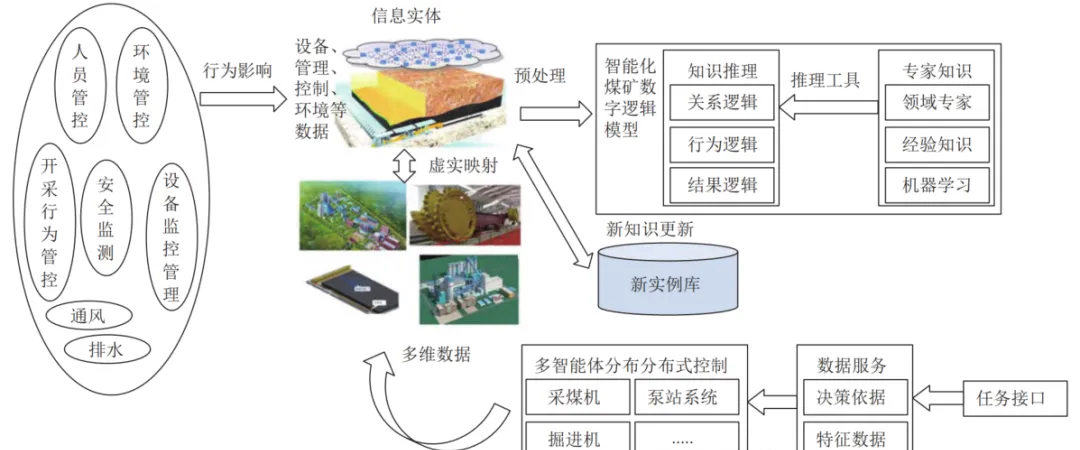
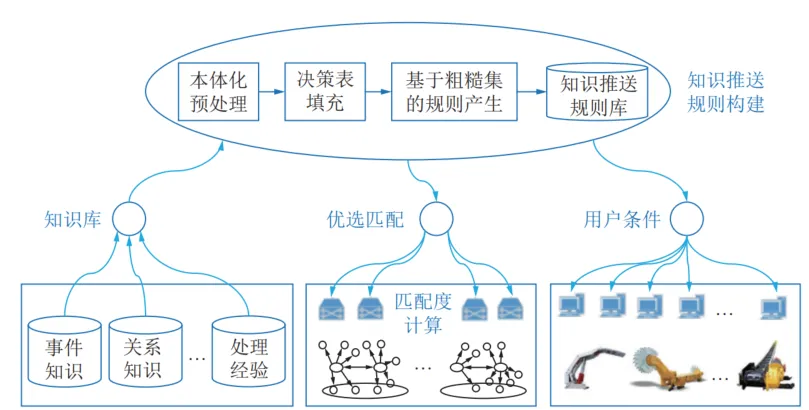
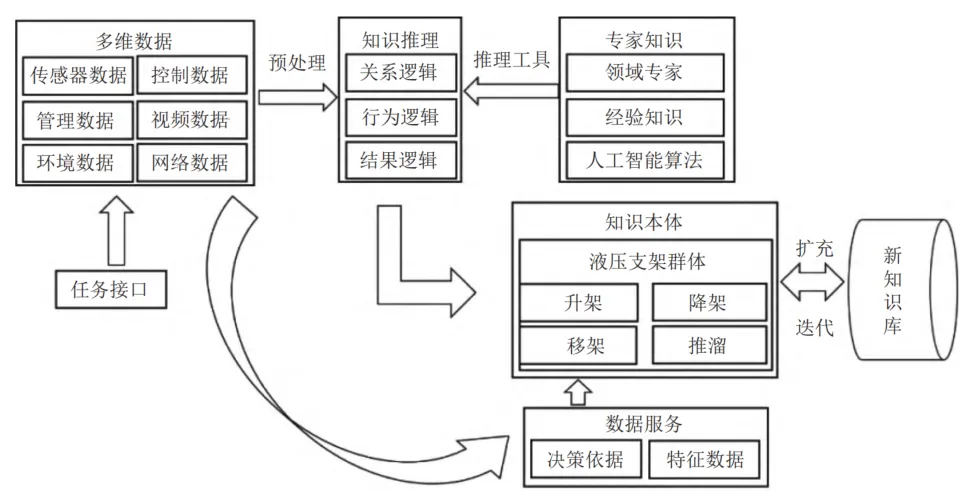
知識圖譜:通過 Apriori 算法挖掘關聯規則,構建基于開采行為的智慧礦山領域本體,建立智慧礦山各層次內部與外延對象間的邏輯關系模型。
數據共享:基于智慧礦山業務需求,對任務進行分解,得到控制決策的本體知識,將匹配數據推送給控制對象,實現數據資源的共享交互和生產信息化管理。
智慧礦山系統工程模型:包括通信網絡、大數據、云計算、物聯網、工業互聯網和智慧礦山機器人,為礦山企業生產運營提供基礎支撐。
3. 地下空間重構與模型動態更新
地下空間重構流程:包括稀疏重建、稠密重建、空間表示和紋理貼圖四個模塊,以機器視覺傳感數據為主,其他傳感數據為輔,構建礦山井下場景的三維視覺空間模型。
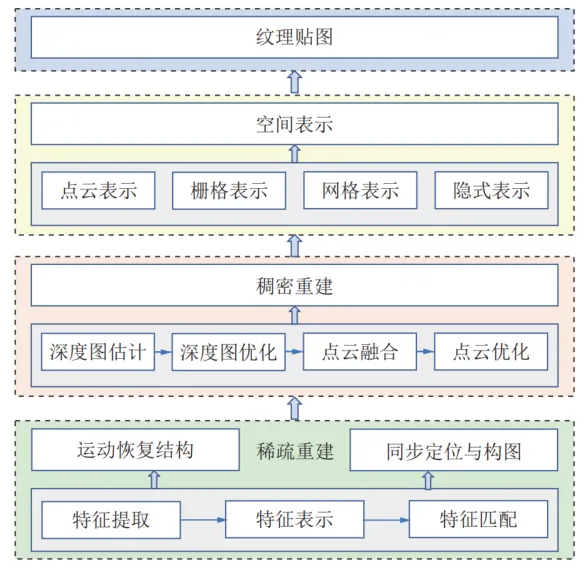
礦山井下場景三維視覺與空間重建框架:以可見光 / 紅外光視覺數據為主,輔以激光、UWB、IMU 等數據,通過設計多傳感器時空標定理論、噪聲抑制策略,實現數據的融合增強,獲取高質量視覺圖像,進行典型目標的精準識別和礦山場景空間模型的高效重建。
4.地下復雜環境機器視覺測量技術
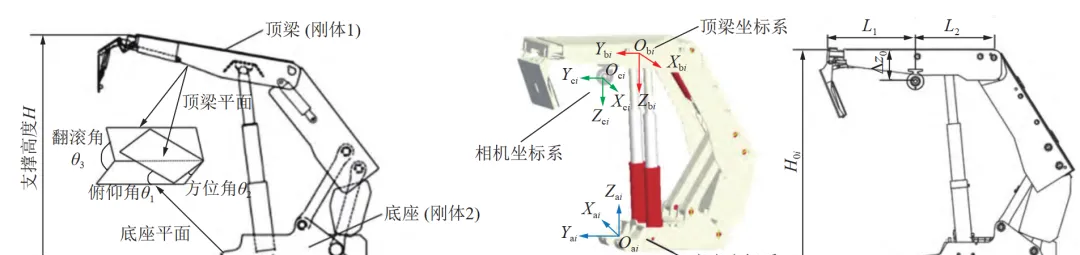
液壓支架單設備位姿檢測:通過安裝在液壓支架頂梁上的 RGB - D 相機,對液壓支架的支護高度、頂梁相對于底座的姿態角進行測量。
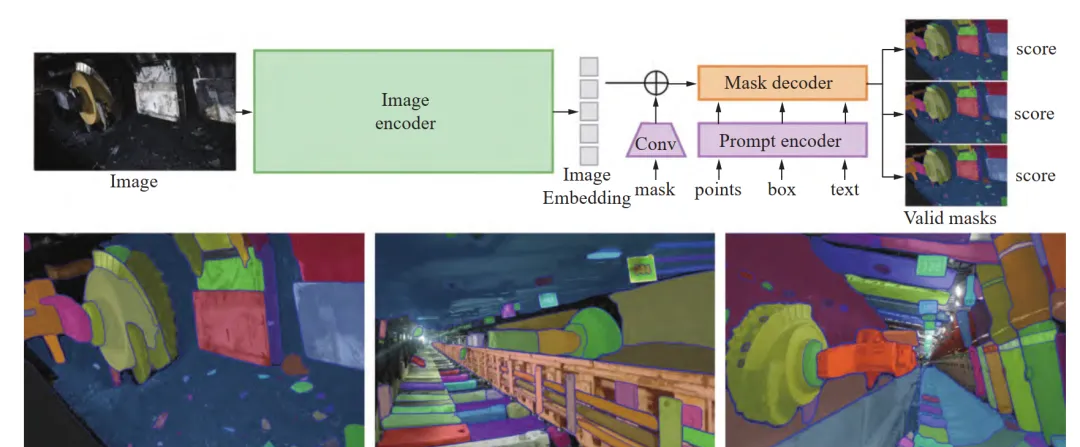
綜采裝備(群)姿態同時空測量:采用基于 Transformer 架構的分割模型進行結構化細粒度辨識,基于裝備標志物的已知結構尺寸進行位姿提取。

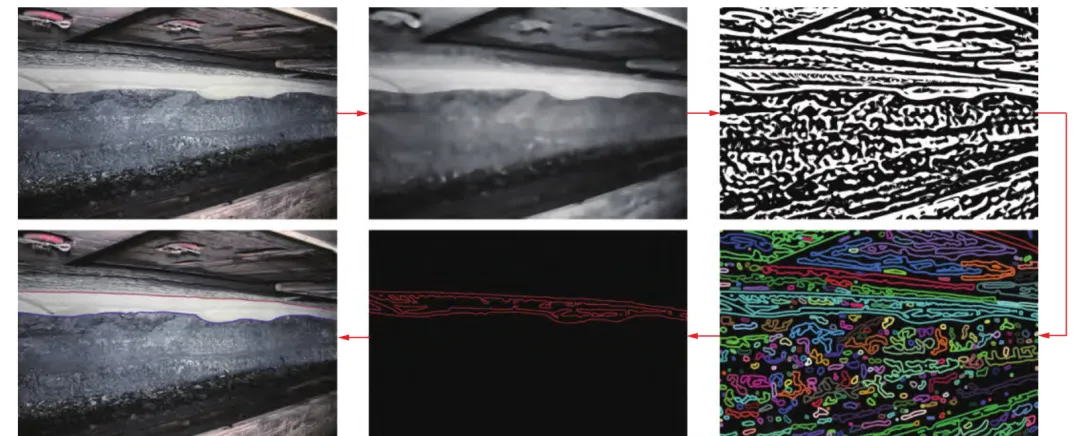
煤巖分界面識別:基于視圖的煤巖分界面提取流程包括圖像噪聲預處理、圖像分割、形態學處理、輪廓提取、分界線提取等。
5.井下瓦斯環境下射頻引爆風險分析
現行標準試驗方法分析:6W安全限值不適用 5G 頻段,相關試驗方法也不適用于 5G 技術,且相關評價指標存在極大的安全系數。
射頻電磁能防爆試驗方法設計:基于半波偶極子天線設計了射頻電磁能防爆專用試驗裝置,試驗結果表明,至少可以將 700MHz 頻段基站功率限值由閾功率 6W 提升到端口功率 20W 以上。
6.全時空信息感知與閉環管控系統
礦井全時空信息感知技術架構:感知控制層負責信息感知和防控指令執行,網絡傳輸層實現信息傳輸,智能支撐層進行數據融合和管理,應用業務層具備防治方案設計等功能。
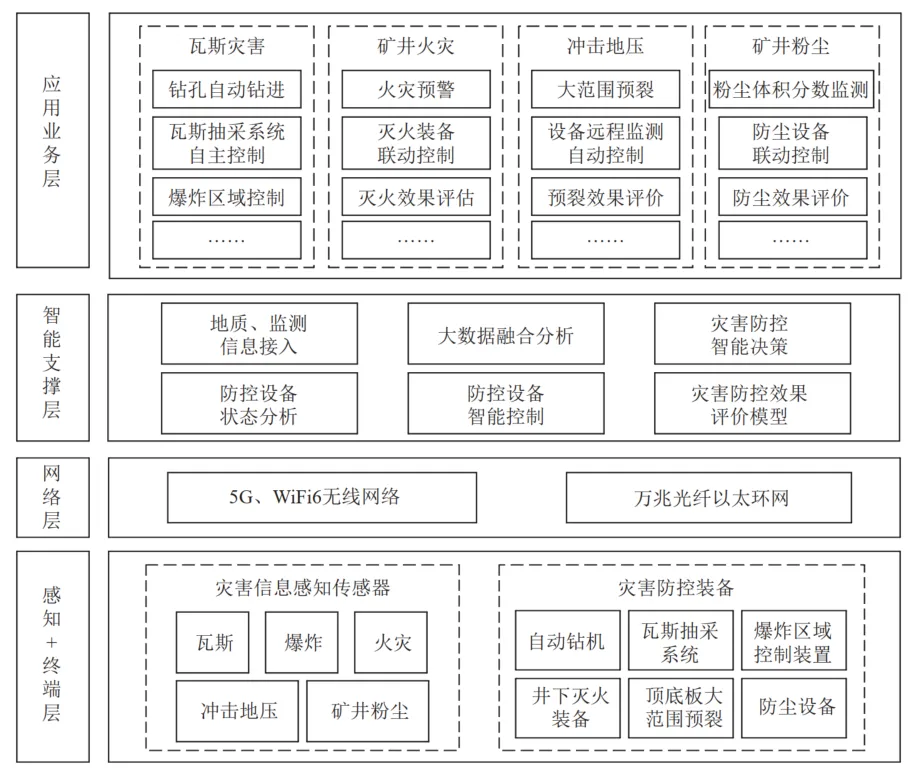
礦井全時空信息感知與融合預警技術:包括瓦斯災害多源信息融合預警技術、火災綜合預警技術、礦井水害預警系統、頂板與沖擊地壓災害預警技術、井下粉塵智能防治技術、煤礦安全態勢融合預警技術。
7. 煤礦智能化技術標準體系
構建原則:給出總體布局和發展規劃,理順標準關系,統一規范關鍵技術,便于了解標準情況。
體系框架:包括基礎通用、信息基礎、賦能平臺與軟件、生產系統與技術裝備、智慧園區與運維管理五個標準子體系。

重點標準化方向及領域:基礎通用標準子體系包括基礎共性標準、設計標準、安全通用標準、智能化共性技術和評價與評估標準等;信息基礎設施標準子體系包括礦井信息網絡、數據標準、邊云協同、煤礦信息安全等;賦能平臺與軟件標準子體系包括地理信息平臺、大數據平臺、綜合管控平臺與煤炭工業軟件、人工智能系統、數字孿生系統等;生產系統與技術裝備標準子體系針對地下、露天生產和煤礦洗選三大生產場景中的智能化生產裝備和系統;智慧園區與運維管理標準子體系包括智能化園區、設備狀態保持、運行維護管理、生產經營管理等。
8. 智能化煤礦巨系統建設實踐
張家峁煤礦智能化系統建設實踐:
高速傳輸網絡建設:覆蓋礦井工業場地、行政辦公、安全生產,5G 基站覆蓋半徑至少達到 150m。
煤礦安全生產管控一體化平臺:基于煤礦安全生產智能化管控平臺、煤礦大數據與數據管理平臺以及煤礦智能化綜合監控平臺構建。
智能化生產及輔助系統:建成多個智能化綜采工作面,研發了智能化快速掘進系統,建設了智能通風系統等。
智慧園區建設:構建了智慧園區綜合管控系統,實現了園區內信息的統一采集、存儲、計算、管理和應用。
檸條塔煤礦機器人集群建設實踐:
煤礦復雜應用場景下目標定位識別方法:研發了基于多視覺傳感器的多元信息拼接算法和多維特征空間全局特征描述方法。
煤礦機器人標準化接入技術:采用基于 OPC UA 的統一機器人通信協議與中間件進行開發,保證數據接入標準化及數據模型對象化。
機器人作業調度策略:提出同類機器人覆蓋作業調度策略,保障區域內機器人響應時間最短。
機器人集群管控與協同調度平臺:分為機器人群層、通信接入層、應用服務層、數據發布層與數據交互層。
9. 金屬礦(井工)智能化建設實踐
金屬礦智能化開采技術架構與關鍵技術:以智能開采共性關鍵技術為支撐,以智能化采礦裝備與工作系統為載體,總體架構包括規劃與調度層、控制層、安全保障層、執行層和驗證與示范層,關鍵技術包括泛在信息采集技術、井下無線通信技術、井下高精度定位與智能導航技術、地下裝備智能控制技術、地下金屬礦多裝備協同控制技術、井下無人采礦作業多區域安全控制技術、無人采礦生產運營一體化集控平臺。
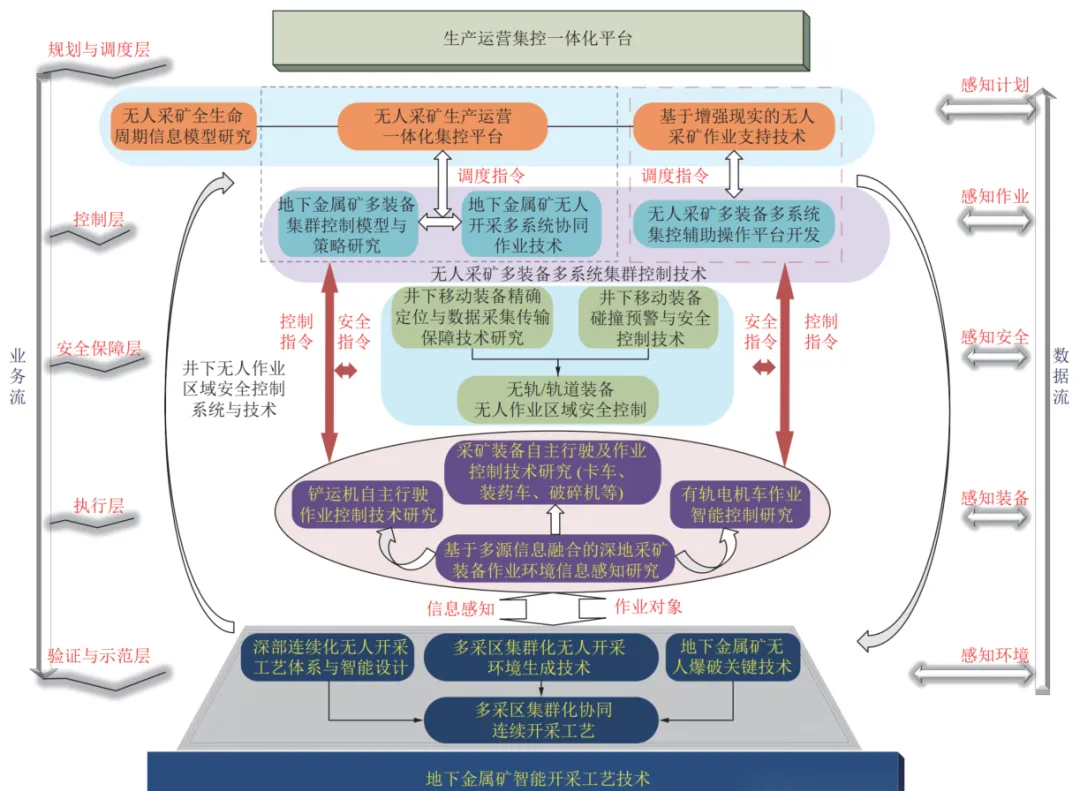
金屬礦(井工)典型智能開采裝備:包括地下智能鏟運機、地下智能礦用汽車、地下智能裝藥車、智能中深孔全液壓鑿巖臺車等。
10. 結語與展望
發展趨勢與展望:深入開展基礎理論研究,推進 5G 應用場景探索與實踐,推進礦山企業數字化轉型升級,加快突破智慧礦山關鍵技術與裝備,聚焦礦山裝備產業創新發展,開展煤礦機器人相關基礎共性關鍵技術研究,推進相關院校礦業工程類專業優化調整,推進智慧礦山建設向智能整體化、系統化邁進。
下一條: 煤礦智能化開采十年技術創新實踐與難題解析
相關資訊

2024/08/02
2025/11/06
2025/10/30

竭誠為廣大用戶提供優質的產品和及時、周到的服務